The real art of problem solving is in deciding the description of the states
and the operators.
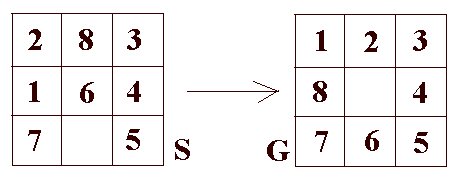
State: location of blank
Operator: blank moves left, right, up and down
Goal Test: match G
Path Cost: each step costs 1 so cost is length of path
Can you work out the operators?
State: (no. missionaries on left bank, no. cannibals on right bank, position of boat (1=left, 0=right))
Operator: 5 operators
Goal test: (0,0,0)
Path cost: number of crossings
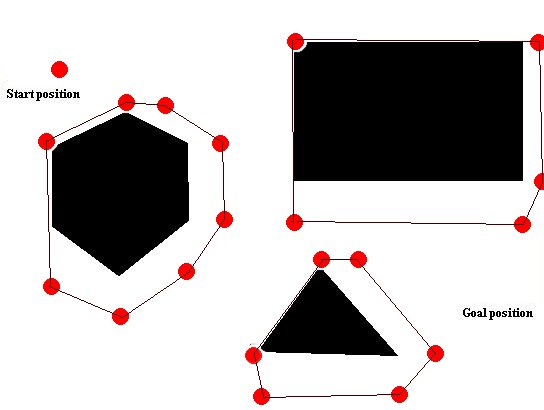
Real Problems
Start and goal positions must be identified alongside any obstacles
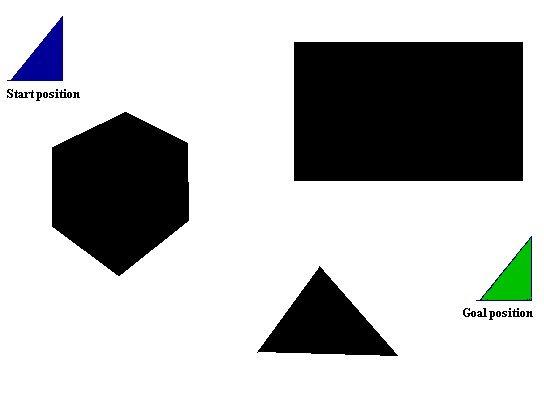
All possible robot positions must be identified, in this example we assume that the robot cannot rotate and then consider the path of a single point.
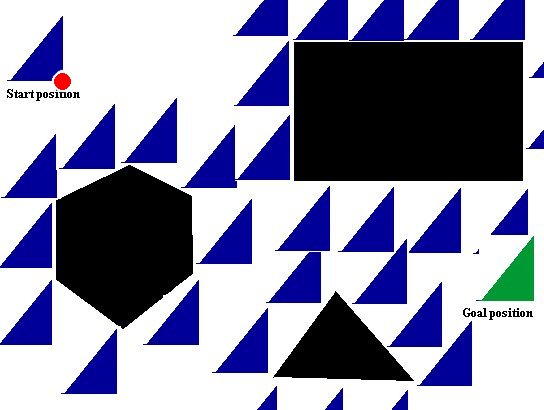
Now that the number of actions are finite the shortlisted paths can be narrowed to only be between these allowable nodes.